- Research Article
- Open access
- Published:
Latency-Optimized and Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks: A Cross-Layer Approach
EURASIP Journal on Wireless Communications and Networking volume 2010, Article number: 323151 (2010)
Abstract
Considering the energy constraint for fixed sensor nodes and the unacceptable long propagation delay, especially for latency sensitive applications of underwater acoustic sensor networks, we propose a MAC protocol that is latency-optimized and energy-efficient scheme and combines the physical layer and the MAC layer to shorten transmission delay. On physical layer, we apply convolution coding and interleaver for transmitted information. Moreover, dynamic code rate is exploited at the receiver side to accelerate data reception rate. On MAC layer, unfixed frame length scheme is applied to reduce transmission delay, and to ensure the data successful transmission rate at the same time. Furthermore, we propose a network topology: an underwater acoustic sensor network with mobile agent. Through fully utilizing the supper capabilities on computation and mobility of autonomous underwater vehicles, the energy consumption for fixed sensor nodes can be extremely reduced, so that the lifetime of networks is extended.
1. Introduction
The earth is water planet. The largely unexplored vastness of the ocean, covering about two-thirds of the surface of the Earth [1], has fascinated humanes for as long as we have records. Recently, there has been a growing interest in monitoring aqueous environments for scientific exploration, commercial exploitation and attack protection, such as oceanographic data collection, pollution monitoring, offshore exploration, disaster prevention, assisted navigation, and tactical surveillance.
The traditional approach for ocean-bottom or ocean-column monitoring is deploy oceanographic sensors, record the data, and recover the instruments. This approach creates long lags in receiving the recorded information. With the advances in acoustic modem technology that enabled high-rate reliable communications, current research focuses on communication between various remote instruments within a network environment. Underwater acoustic sensor networks (UASNs) can be used to increase the operation range of autonomous underwater vehicles. The feasible wireless communication range of an autonomous underwater vehicle is limited by the acoustic range of a single modem. By hopping the control and data messages through a network that covers large areas, the range of autonomous underwater vehicles can be considerably increased. Therefore, UASNs are attracting increasing interest from researchers in terrestrial radio-based sensor networks.
To make above applications viable, there is a need to enable underwater communications among underwater devices, since there are important physical, technological, and economic differences between terrestrial and underwater sensor networks. The shallow-water acoustic channel differing from radio channel is limited and depends on both range and frequency [2]. Within this limited bandwidth, the acoustic signals are subject to time-varying multipath, which may result in severe intersymbol interference (ISI) and large Doppler shifts and spreads, relative to radio channels. Moreover, underwater networks are often characterized by more expensive equipment, worse physical characteristics [3], higher mobility, sparser deployments, and different energy regimes.
Medium access (MAC) is an unresolved problem due to energy limitations, long propagation delays, low data rates, and difficulty of synchronization [4–8]. Novel MAC protocols that help solve these problems are likely to play the key role in creating breakthrough in underwater communications for marine and aquatic ecological research.
A range of MAC protocols have been explored for underwater networks. They can be mainly classified into two categories.
-
(i)
Schedule-Based MAC Protocols
FDMA scheme is used by underwater networks [9]. While, for the limited bandwidth and frequency selectivity of underwater channel, this was not ideal method. A TDMA-CDMA hybrid method with MACA-style RTS/CTS/DATA handshakes is recently applied into Seaweb experiments [10], in which selective retransmission and provision for channel-adaptive protocol parameters are included. TDMA scheme is used in a single-hop, star-topology UASNs for Mine Countermeasures operations [11] and an ACMENet [12] that adaptively adjust data rates and transmission power.
-
(ii)
Random-Accessed MAC Protocols
Based on CSMA/CA, in [13], an ad hoc network MAC protocol was proposed with prioritized messages and improved access for multipacket transfer. While, for the hidden terminal problem and energy constraint problem in multihop underwater networks, a distributed, scalable, energy-efficient MAC protocol is proposed in [14]. They demonstrated that this protocol can be used for delay-tolerant applications and has the potential for serve as a primer for the development of energy-efficient MAC protocols for future underwater sensor networks. Another derivation of CSMA/CA is proposed in [15], in which a WAIT command is integrated to further avoid collision for reducing the high cost considering the delay of transmissions and the available throughput.
However, for those existed MAC protocols, the extreme long propagation delay and the asymmetric nature for underwater channel are not specially considered during the algorithm design process. In this paper, for latency sensitive applications of underwater acoustic sensor networks, we propose a MAC protocol that is latency-optimized and energy-efficient scheme and combines the Physical layer and the MAC layer to shorten transmission delay. Moreover, we propose a network topology: an underwater acoustic sensor network with mobile agent. Through fully utilizing the supper capabilities on computation and mobility of autonomous underwater vehicle, the energy consumption for fixed sensor nodes can be extremely reduced, so that the lifetime of underwater networks is extended.
The remainder of this paper is organized as follows. Section 2 describes our motivations and network model. The detail of our latency-optimized and energy-efficient MAC protocol is discussed in Section 3. Simulation results are given in Section 4. Section 5 concludes this paper.
2. Motivations and Network Model
2.1. Motivations
Standard acoustic transducers cannot simultaneously transmit and receive. On space-constrained autonomous underwater vehicles (AUVs) and compact stationary nodes, transducers in different frequency bands cannot be spatially separated far enough to provide full-duplex connections. Underwater network communications are therefore almost always half-duplex. Furthermore, transducer sizes are proportional to wavelength, and due to space constraints, small AUVs are often restricted to using higher center frequencies, generally above 10 kHz [16]. Another issue is that it is easy for small AUVs to transmit at high data rates but harder for them to receive at high rates. The two main reasons for this asymmetry nature are [17] the following.
-
(i)
the self-noise [18] of AUVs often significantly reduces the signal to noise (SNR) available at receiver side. This means that coherent, high rate (and thus low power per bit) communication is very challenging.
-
(ii)
space limitations of AUVs make it difficult to install acoustic arrays that provide the best performance for coherent receiver algorithms.
For sending short commands to underwater vehicles, low-rate and moderate-rate transmission methods, such as FSK, have been shown to be relative reliable. While, when allowing for transfer of complicated mission plans or other large data commodities, high-rate methods are needed. In [19], a two-way phase-coherent communication scheme is proposed to provide high-rate connectivity for AUVs. The telemetry system designer is driven to employ a coherent system for greater data throughput, but the sensitivity issues of coherently demodulated systems to channel fluctuations may require more robust incoherent demodulation. The selection must be made careful consideration of anticipated channel behavior and coherent signaling used only in applications where the fluctuation level and dynamics are sufficiently low to permit coherent carrier acquisition and tracking.
The propagation speed in the underwater channel is five orders of magnitude lower than that of the radio channel. Large delays between transactions can reduce the throughput the system considerably if it is not taken into account. Another crucial challenge for UASNs designers is to develop a system that will run for years unattendedly, which calls for not only robust hardware and software, but also lasting energy sources. However, currently, sensor nodes are powered by battery, whose available energy is limited. Therefore, protocols and applications designed for UASNs should be highly efficient and optimized in terms of energy.
2.2. Network Model
Underwater acoustic networks are generally formed by acoustically connected ocean-bottom sensors, autonomous underwater vehicles, which are robots and can travel underwater, and surface stations. While many applications require long-term monitoring of the deployment area, the battery-powered network nodes limit the lifetime of UASNs. In this paper, we propose an underwater acoustic sensor network with mobile agent (UASNMA), a new network architecture especially for low power and large-scale underwater networks. As illustrated in Figure 1, a group of sensor nodes are anchored to the bottom of the ocean with deep ocean anchors. AUVs are exploited as mobile agent in our network. These devices are powered by batteries or fuel cells and can operate in water as deep as 6000 meters. Advances in propulsion systems and power source technology give these robotic submarines extended endurance in both time and distance. Compared to fixed sensor nodes, AUVs are powerful hardware units, both in their communication, processing capability, and in their ability to traverse the networks.

Underwater acoustic sensor networks architecture.
For large-scale networks, there are three basic topologies that can be exploited to interconnect network nodes: centralized, distributed, and multihop topologies [20]. Considering scalability, power consumption, and robustness, we utilize a distributed topology for our UASNMA. That is, the distributedly deployed fixed sensor nodes collect environment-related data, and then transmit those data to AUVs around them. Through the high rate connections between AUVs and surface stations or satellites, which can further be connected to a backbone, such as the Internet, through a RF link, collected data are relayed to the data centers with short transmission delay. AUVs need not always to be present or operational along with individual sensor nodes for burst traffic, and they are in action only when it is necessary to collect data and perform network maintenance. Through AUVs traversing the network, the computing complexity and energy for routing is reduced. This configuration creates an interactive environment where scientists can extract real-time data from multiple distant underwater instruments. After evaluating the obtained data, control messages can be sent to individual instruments and the network can be adapted to changing situations.
3. Latency-Optimized and Energy-Efficient MAC (LO-MAC) Protocol for Underwater Acoustic Sensor Networks
For the network model we define previously, a suitable MAC protocol is needed when several sensor nodes have data to transmit and stay within the communication range of a same AUV, and the AUV receives data with higher rate to reduce the transmission delay. Besides the fairness and the spectrum efficiency that are two main factors for MAC design, energy reservation is more important to be considered for our energy strictly constraint UASNs. Moreover, the energy costs in UASNs are different from those in terrestrial radio-based networks. In UASNs, transmission power dominates compared with receive power [16]. Consequently, this nature of UASNs degrades the energy reservation performance for energy-efficient MAC protocols, which focus on shortening idle listening time to implement energy reservation. This inspire us that reducing the energy waste on collision and retransmission is the key part for UASNs.
3.1. Energy Efficiency Analysis
For our network model, to transmit an  -symbol message for a distance
-symbol message for a distance  , the node expends
, the node expends

and to receive this message, the node expends

The typical transmission electronics energy,  , is 50 W, and the typical value for reception,
, is 50 W, and the typical value for reception,  , is 0.2 W to 2 W [16]. The electronics energy,
, is 0.2 W to 2 W [16]. The electronics energy,  , depends on factors such as coding, modulation, pulse-shaping, and matched filtering. The transmitter outputs
, depends on factors such as coding, modulation, pulse-shaping, and matched filtering. The transmitter outputs  to traverse a unit distance and reach the receiver with an acceptable SNR, which depends on the distance to the receiver and the acceptable bit error rate. Hence, the total energy consumption
to traverse a unit distance and reach the receiver with an acceptable SNR, which depends on the distance to the receiver and the acceptable bit error rate. Hence, the total energy consumption  with
with  fixed sensors is
fixed sensors is

However, for the flat ad hoc architecture, we use the same model in [21] to calculate the expected total energy expenditure  as follows
as follows

where  and
and  are the expected energy consumed by the one-hope transmission and reception of a sensor, which is at a distance
are the expected energy consumed by the one-hope transmission and reception of a sensor, which is at a distance  away from the access point and the expected number of hops that sensor's packet needs to make to reach to the access point.
away from the access point and the expected number of hops that sensor's packet needs to make to reach to the access point.
Therefor, for a network with  fixed sensors, which are randomly and uniformly deployed on a disk with a radius of
fixed sensors, which are randomly and uniformly deployed on a disk with a radius of  meters, the total energy consumption is
meters, the total energy consumption is

3.2. Media Access Control
Combining the advantages of schedule-based MAC protocols and random-access MAC protocols, we apply energy-efficient asynchronous schedule-based MAC (ASMAC) protocol [22] to charge the common channel sharing among sensor nodes. ASMAC can remove accumulative clock-drifts without any network synchronization. Moreover, ASMAC adjusts essential algorithm parameters, which can ensure adequate successful transmission rate, short waiting-time, and high energy-utilization adaptively according to the traffic strength and network density.
ASMAC protocol divides system time into four phases: T RFR-P hase, S chedule-P hase, O n-P hase, and O ff-P hase (Figure 2).

System time scheme structure.
-
(i)
T RFR-P hase is preserved for data-collection nodes to send TRFR messages (Figure 3) to data-gathering nodes.
-
(ii)
S chedule-P hase is preserved for data-gathering nodes to locally broadcast phase-switching schedules.
-
(iii)
O ff-P hase is preserved for data-collection nodes to power off their radios. In this phase, there is no communication, but data storing and sensing may happen.
-
(iv)
O n-P hase is preserved for data-collection nodes to power on their radios to carry on communication.
Figure 3 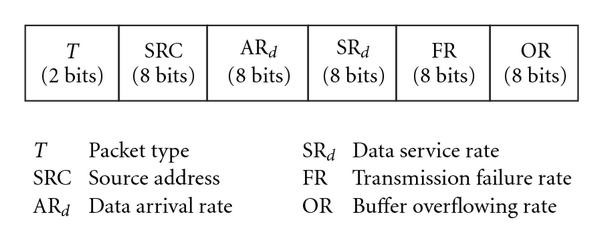
TRFR message format.

At the end of each O n-P hase, nodes go to "vacation"—O ff-P hase, for a period of time. Thus, new arrivals during an O n-P hase can be served in first-in-first-out (FIFO) order. While, new arrivals during an O ff-P hase, rather than going into service immediately, wait until the end of this O ff-P hase, then they are served in O n-P hase and in FIFO order. Interarrival time and service time for data packets are independent and follow general distribution  and
and  individually. For average interarrival time
individually. For average interarrival time  , we have
, we have  . Similarly, for average service time
. Similarly, for average service time  , we have
, we have  .
.
According to received schedule messages (Figure 4), nodes set up their own phase-switching schedules, which ensure them to switch to the same phase simultaneously.

Schedule message packet format for ASMAC.
ASMAC utilizes two techniques to make its scheme robust and feasible to use free-running timing method [23], which allows nodes to run on their own clocks and makes contribution to save the energy used by setting up and maintaining the global or common timescale. Firstly, schedule messages are broadcasted. Leveraging the property of broadcast, schedule messages can reach all data-collection nodes at the same time once ignoring the difference of propagation time of them (it is reasonable since the propagation time within a cluster, which is between 0.1 and 1 microseconds). Moreover, nodes go to O n-P hase immediately after receiving schedule messages. Secondly, in a schedule message, all time references, such as On-Duration and Off-Duration, are relative values rather than absolute values. This property can eliminate errors introduced by sending time and access time.
Note that, based on schedule messages and nodes' local clocks, phase-switching schedules are supposed to be established at each node to ensure matching operations if no clock-drift. However, mismatching operations among nodes are unavoidable, since there are always clock-drifts caused by unstable and inaccurate frequency standards. So it is possible that transmitters have powered on their radios to send message, but receivers' radios are still powered off. Those mismatching operations cause communication to fail. Moreover, with the accumulative clock-drift becoming bigger and bigger, the impact on communications turns to be more and more serious. The solution in ASMAC is to rebroadcast schedule message, which forces data-collection nodes to remove accumulative clock-drifts and to reestablish matching schedules.
While, how can data-collection nodes know the time of next schedule broadcast so as to power on their radios? The solution is that ASMAC includes reschedule interval information into schedule messages. To preestimate the value of schedule interval, a rescheduling-FLS is designed to monitor the influence of accumulative clock-drifts, the variance of traffic strength and service capability on communications. Then ASMAC can adjust schedule interval and power-on/off duration adaptively. ASMAC uses

as the interval adjustment function. Where  is the interval for the
is the interval for the  th schedule broadcast,
th schedule broadcast,  is the
is the  th adjustment factor determined by our rescheduling-FLS.
th adjustment factor determined by our rescheduling-FLS.
Hence each node within a cluster is synchronized to a reference packet (schedule message) that is injected into the physical channel at the same instant. Furthermore, after a same period of time specified by  , all nodes switch to O ff-P hase and stay there for a
, all nodes switch to O ff-P hase and stay there for a  period. Finally, all nodes switch back to O n-P hase. Phase is circulatedly switched like this way (see Figure 5).
period. Finally, all nodes switch back to O n-P hase. Phase is circulatedly switched like this way (see Figure 5).

Flow chart for (a) data-gathering nodes and (b) data-collection nodes to establish and maintain matching schedules in ASMAC.
Therefore, there should be at least one available AUV for each sensor cluster during its O n-P hase. According to those information, we can decide an AUV's navigation path and how many AUV are needed to cover the whole network.
3.3. Optimize Data Packet Size
Normally, shortening the transmission delay for each data packet is considered during the transmission protocol design. However, for large data applications, the transmission delay for whole set of data should be more considered, since after all information received the data processing process can be started. Therefore, choosing the transmission delay for one set of data is more reasonable/meaningful to optimize transmission delay performance for MAC protocols. Moreover, almost all underwater communications use acoustics. The speed of sound underwater is approximately 1500 m/s. This leads to unneglectable propagation delays. The transmission delay ( ) for a set of data is described as follows
) for a set of data is described as follows

where  is the number of segment a set of data is divided into at MAC layer;
is the number of segment a set of data is divided into at MAC layer;  is the length for information part of a frame. The unit is bit;
is the length for information part of a frame. The unit is bit;  is the length for MAC header of a frame. The unit is bit;
is the length for MAC header of a frame. The unit is bit;  is the data reception rate. The unit is bits/sec;
is the data reception rate. The unit is bits/sec;  is the distance between a sensor node and an AUVs; and
is the distance between a sensor node and an AUVs; and  is the speed of sound in water.
is the speed of sound in water.
From (7), note that, there are two options to reduce the value for  :
:
-
(i)
decreasing the segments number
 , or using larger frame size
, or using larger frame size  during transmission;
during transmission; -
(ii)
increasing data reception rate
 .
.
 , or using larger frame size
, or using larger frame size  during transmission;
during transmission; .
.Assuming we know the bit error rate (BER) for the given channel and the transmission/receiption scheme (including modulation/demodualtion and channel coding/decoding, etc.), then the frame error rate (FER) can be formulated as in (8). Obviously, for the same BER channel, larger frame size will increase the FER, which means decreasing the effective throughput of systems,

Therefore, there is a tradeoff between reducing the data transmission delay and increasing the data successful transmission rate during our MAC protocol design. This also inspire us to achieve the criterion for determining frame size, as described in (9). Consequently, according to the expected FER, channel status, and transmission/receiption schemes, we can adaptively determine the optimum frame size for transmission,

Therefore, for  , the longest length of payload part is
, the longest length of payload part is  when fixing the BER. Bring it into (7), the shortest transmission latency is shown in (10) when fixing
when fixing the BER. Bring it into (7), the shortest transmission latency is shown in (10) when fixing  . Here
. Here  is the total size of a set of data
is the total size of a set of data

3.4. Transmission Scheme at Physical Layer
Compared to terrestrial sensor networks, the underwater channel is asymmetric. That is, the data receiving rate at the receiver side should be some lower than the one at the transmission side for propulsion noise, since the receiver's SNR is much lower than the one of transmitters. This will be a bottleneck, especially for large data applications. How to increase data reception rate, while keeping the same performance in terms of BER, is our another task in this paper.
To reduce the system-error probability, error correction coding is used. Rayleigh and Rician signal fading imposes an expensive tradeoff between system reliability and transmitted power. Convolutional codes [24] are a class of important codes due to their flexibility in code length, soft decodability (e.g., using the BCJR algorithm or soft output Viterbi algorithm (SOVA)), short decoding delay (e.g., using windowed Viterbi algorithm), and their role as component codes in parallelly/serially concatenated codes. Puncturing allows convolutional codes to flexibly change rates and is widely used in applications where high code rates are required and where rate adaptivity is desired [24].
We apply convolutional coding to encode the information bits, then the code words are interleaved. Interleaver [24] was used to eliminate the correlation of the noise/fading process affecting adjacent symbols in a received code word, but here we use interleaver to make sure that the incorrect symbols in one compromised path will be spread after deinterleaver so that the Viterbi decoder will perform well. The interleaved bits are inserted with some unique words (for demodulation purpose), and then these bits are modulated to symbols. For data receiving rate enhancement, we apply the puncture idea at the receiver side. Since the received symbols are reduced, the power per bit is increased. Therefore, the SNR at the receiver side is increased with the same environment noise and the same channel fading effects. While, puncture scheme impact the performance directly.
In general, the design of an error correction coding system usually consists of selecting a fixed code with a certain rate and all the data to be transmitted/reveived and adapted to the average or worst channel conditions to be expected. In many cases, one would like to be more flexible because the data to be transmitted/received have different error protection needs and the channel is time varying or has insufficiently known parameters. Consequently, flexible and adaptive data transmission/reception scheme is expected. Hence, at the receiver side, the puncture rate can be adaptively adjusted based on current channel state to ensure the satisfied BER for received data.
4. Simulations and Performance Analysis
Fading is common in underwater acoustic networks. We model such fading as Rician fading. The channel gain,

can be treated as a wide-sense stationary complex Gaussian random process, and  and
and  are Gaussian random processes with nonzero means
are Gaussian random processes with nonzero means  and
and  , respectively; and they have same variance
, respectively; and they have same variance  , then the magnitude of the received complex envelop has a Rician distribution
, then the magnitude of the received complex envelop has a Rician distribution

where

and  is the zero-order modified Bessel function. This kind of channel is known as Rician fading channel. A Rician channel is characterized by two parameters, Rician factor
is the zero-order modified Bessel function. This kind of channel is known as Rician fading channel. A Rician channel is characterized by two parameters, Rician factor  , which is the ratio of the direct path power to that of the multipath, that is,
, which is the ratio of the direct path power to that of the multipath, that is,  , and the Doppler spread (or single-sided fading bandwidth)
, and the Doppler spread (or single-sided fading bandwidth)  . We simulate the Rician fading using a direct path added by a Rayleigh fading generator. The Rayleigh fade generator is based on Jakes model [25], in which an ensemble of sinusoidal waveforms added together to simulate the coherent sum of scattered rays with Doppler spread
. We simulate the Rician fading using a direct path added by a Rayleigh fading generator. The Rayleigh fade generator is based on Jakes model [25], in which an ensemble of sinusoidal waveforms added together to simulate the coherent sum of scattered rays with Doppler spread  arriving from different directions to the receiver. The amplitude of the Rayleigh fade generator is controlled by the Rician factor
arriving from different directions to the receiver. The amplitude of the Rayleigh fade generator is controlled by the Rician factor  .
.
Under various fading situations, that is,  dB,
dB,  = 100 Hz,
= 100 Hz,  dB,
dB,  Hz and
Hz and  dB,
dB,  Hz, we run simulations to check the performance of our schemes. The convolutional code rate we use is
Hz, we run simulations to check the performance of our schemes. The convolutional code rate we use is  . Puncture rates are
. Puncture rates are  . The data rate is 32 kbps. The modulation scheme is QPSK. The simulation results are shown in Figures 6, 7, and 8.
. The data rate is 32 kbps. The modulation scheme is QPSK. The simulation results are shown in Figures 6, 7, and 8.

Average BER versus  for LO-MAC in Rician fading channel (
for LO-MAC in Rician fading channel ( dB,
dB,  Hz).
Hz).

Average BER versus  for LO-MAC in Rician fading channel (
for LO-MAC in Rician fading channel ( dB,
dB,  Hz).
Hz).

Average BER versus  for LO-MAC in Rician fading channel (
for LO-MAC in Rician fading channel ( dB,
dB,  Hz).
Hz).
Note that
-
(i)
under the same SNR, our scheme LO-MAC has some BER gain. Moreover, the gain is bigger with the increase of SNR at the receiver side;
-
(ii)
for LO-MAC, to obtain same BER performance, lower SNR can be used, that means higher receiving rate can be applied or lower transmission power can be used;
-
(iii)
for the same SNR condition, the improvement for
 dB,
dB,  Hz is the smallest one compared with
Hz is the smallest one compared with  dB,
dB,  Hz and
Hz and  dB,
dB,  Hz;
Hz; -
(iv)
lower puncture rate (i.e., less information bits being removed) does not mean better performance. We found that for convolutional code rate
 , the optimum puncture rate is
, the optimum puncture rate is  and
and  . For convolutional code rate
. For convolutional code rate  , the optimum puncture rate is
, the optimum puncture rate is  and
and  at the same channel condition and data transmission rate;
at the same channel condition and data transmission rate; -
(v)
To gain acceptable BER performance,
 code rate needs higher SNR at the receiver side.
code rate needs higher SNR at the receiver side.
 dB,
dB,  Hz is the smallest one compared with
Hz is the smallest one compared with  dB,
dB,  Hz and
Hz and  dB,
dB,  Hz;
Hz; , the optimum puncture rate is
, the optimum puncture rate is  and
and  . For convolutional code rate
. For convolutional code rate  , the optimum puncture rate is
, the optimum puncture rate is  and
and  at the same channel condition and data transmission rate;
at the same channel condition and data transmission rate; code rate needs higher SNR at the receiver side.
code rate needs higher SNR at the receiver side.5. Conclusions
In this paper, considering the energy constraint for sensor nodes and the unacceptable long propagation delay, especially for latency sensitive applications of underwater acoustic sensor networks, we propose a MAC protocol that is latency-optimized and energy-efficient scheme and combines the Physical layer and the MAC layer to shorten transmission delay. On physical layer, we applied convolutional coding and interleaver for transmitted information. Dynamic code rate is exploited at the receiver side to accelerate data reception rate. On MAC layer, unfixed frame length scheme is applied to reduce transmission delay, and ensure the data successful transmission rate at the same time. Moreover, we propose a network topology: an underwater acoustic sensor network with mobile agent. Through fully utilizing the supper capabilities on computation and mobility of autonomous underwater vehicle, the energy consumption for fixed sensor nodes can be extremely reduced, so that the lifetime of underwater networks is extended.
References
Cui J, Kong J, Gerla M, Zhou S: Challenges of building scalable mobile underwater wireless sensor networks for aquatic applications. IEEE Network 2006, 20(3):12-18. 10.1109/MNET.2006.1637927
Berkhoviskikh L, Lysanov Y: Fundamentals of Ocean Acoustics. Springer, New York, NY, USA; 1982.
Catipovic JA: Performance limitations in underwater acoustic telemetry. IEEE Journal of Oceanic Engineering 1990, 15(3):205-216. 10.1109/48.107149
Kilfoyle DB, Baggeroer A: The state of the art in underwater acoustic telemetry. IEEE Journal of Oceanic Engineering 2000, 25(1):4-27. 10.1109/48.820733
Sozer EM, Stojanovic M, Proakis JG: Underwater acoustic networks. IEEE Journal of Oceanic Engineering 2000, 25(1):72-83. 10.1109/48.820738
Proakis JG: Digital Communications. McGraw-Hill, New York, NY, USA; 2001.
Akyildiz IF, Pompili D, Melodia T: Underwater acoustic sensor networks: research challenges. Ad Hoc Networks 2005, 3(3):257-279. 10.1016/j.adhoc.2005.01.004
Akyildiz IF, Pompili D, Melodia T: Challenges for efficient communication in underwater acoustic sensor networks. ACM Sigbed Review 2004, 1(2):3-8. 10.1145/1121776.1121779
Rice J, Creber B, Fletcher C, et al.: Evolution of seaweb underwater acoustic networking. Proceedings of the IEEE Conference of the Oceans on Information Systems and Sciences, September 2000, Princeton, NJ, USA 2007-2017.
Rice J: Seaweb acoustic communication and navigation networks. Proceedings of the 2nd International Conference on Underwater Acoustic Measurements: Technologies and Results, July 2005, Nafplion, Greece 1-7.
Freitag L, Grund M, Alt CV, Stokey R, Austin T: A shallow water acoustic network for mine countermeasures operations with autonomous underwater vehicles. Proceedings of the International Conference on Underwater Defense Technology (UDT '05), June 2005, Hamburg, Germany 1-6.
Acar G, Adams AE: Acmenet: an underwater acoustic sensor network for real-time environmental monitoring in coastal areas. Proceedings of the Conference on Radar, Sonar and Navigation, August 2006 365-380.
Smith S, Park JC, Neel A: A peer-to-peer communication protocol for underwater acoustic communication. Proceedings of the MTS/IEEE Oceans Conference and Exhibition, October 1997 268-272.
Rodoplu V, Park MK: An energy-efficient mac protocol for underwater wireless acoustic networks. Proceedings of the MTS/IEEE Oceans, September 2005 1198-1203.
Doukkali H, Nuaymi L, Houcke S: Distributed mac protocols for underwater acoustic data networks. Proceedings of the 64th IEEE Vehicular Technology Conference (VTC '06), September 2006, Montréal, Canada 1-5.
Partan J, Kurose J, Levine BN: A survey practical issues in underwater networks. Proceedings of the 1st ACM International Workshop on Underwater Networks (WUWNet '06), September 2006, Los Angeles, Calif, USA 17-24.
Freitag L, Grund M, Catipovic J, Nagle D, Pazol B, Glynn J: Acoustic communications with small uuvs using a hull-mounted conformal array. Proceedings of the MTS/IEEE Oceans Conference, November 2001 2270-2275.
Stephens RWB: Underwater Acoustics. Wiley-Interscience, New York, NY, USA; 1970.
Freitag L, Grund M, Singh S, et al.: A bidirectional coherent acoustic communication system for underwater vehicles. Proceedings of the MTS/IEEE Oceans Conference, September 1998 482-486.
Pahlavan K, Levesque AH: Wireless Information Networks. John Wiley & Sons, New York, NY, USA; 1995.
Tong L, Zhao Q, Adireddy S: Sensor networks with mobile agents. Proceedings of the IEEE Military Communications Conference (MILCOM '03), October 2003, Boston, Mass, USA 1-6.
Ren Q, Liang Q: Asynchronous energy-efficient mac protocols for wireless. Proceedings of the IEEE Military Communications Conference (MILCOM '05), October 2005, Atlantic City, NJ, USA
Elson JE: Time synchronization in wireless sensor networks, Ph.D. dissertation. Department of Computer Science, University of California, Los Angeles, Calif, USA; 2003.
Wicker SB: Error Control Systems for Digital Communication and Storage. Prentice-Hall, Englewood Cliffs, NJ, USA; 1995.
Jakes WC: Microwave Mobile Communication. IEEE Press, Piscataway, NJ, USA; 1993.
Acknowledgments
This work was supported in part by the Office of Naval Research (ONR) under Grants N00014-07-1-0395, N00014-07-1-1024, and by the National Science Foundation (NSF) under Grant CNS-0721515.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Ren, Q., Cheng, X. Latency-Optimized and Energy-Efficient MAC Protocol for Underwater Acoustic Sensor Networks: A Cross-Layer Approach. J Wireless Com Network 2010, 323151 (2010). https://doi.org/10.1155/2010/323151
Received:
Accepted:
Published:
DOI: https://doi.org/10.1155/2010/323151