- Research Article
- Open access
- Published:
Development of a Testbed for Wireless Underground Sensor Networks
EURASIP Journal on Wireless Communications and Networking volume 2010, Article number: 620307 (2010)
Abstract
Wireless Underground Sensor Networks (WUSNs) constitute one of the promising application areas of the recently developed wireless sensor networking techniques. WUSN is a specialized kind of Wireless Sensor Network (WSN) that mainly focuses on the use of sensors that communicate through soil. Recent models for the wireless underground communication channel are proposed but few field experiments were realized to verify the accuracy of the models. The realization of field WUSN experiments proved to be extremely complex and time-consuming in comparison with the traditional wireless environment. To the best of our knowledge, this is the first work that proposes guidelines for the development of an outdoor WUSN testbed with the goals of improving the accuracy and reducing of time for WUSN experiments. Although the work mainly aims WUSNs, many of the presented practices can also be applied to generic WSN testbeds.
1. Introduction
Wireless Underground Sensor Networks (WUSNs) are a natural extension of the wireless sensor network (WSN) phenomenon to the underground environment. WUSNs have been considered as a potential field that will enable a wide variety of novel applications in the fields of intelligent irrigation, border patrol, assisted navigation, sports field maintenance, intruder detection, and infrastructure monitoring [1]. Despite their potential, very few field experiments [2–4] have been realized, which delays the proliferation of WUSN applications. Recent models for the wireless underground communication channel are also proposed but few field experiments was realized to verify the accuracy of the models [2, 3, 5]. One possible explanation for the lack of a significant number of field experiments for WUSNs is that such experiments proved to be extremely complex and present novel challenges compared to the traditional wireless environment. Moreover, constant changes in the outdoor environment, such as the soil moisture, can contribute to the problems related to the repeatability and comparisons between WUSN experiments.
In this paper, we describe a WUSN testbed which was built in two locations. The first part of the experiments was realized in University of Nebraska-Lincoln City Campus on a field provided by the UNL Landscaping Services during August–November  period. The second part of the experiments was realized in UNL South Central Agricultural Laboratory, Clay Center, NE, during July–October
period. The second part of the experiments was realized in UNL South Central Agricultural Laboratory, Clay Center, NE, during July–October  period. Moreover, the experiments in [4] followed the guidelines described in this work. Based on the experiences acquired from hundreds of hours of WUSN experiments in this testbed, the details related to the development of an outdoor WUSN testbed are presented in this work. To the best of our knowledge, this is the first work that proposes guidelines for the development of a WUSN testbed to improve the accuracy and to reduce the time for WUSN experiments. The recommended practices in this work range from radio frequency (RF) measurements using sensor nodes to the use of practical techniques that significantly reduce the time to install and remove the sensor nodes in the underground setting. The main objective of this work is the proliferation of best practices in the area of WUSNs in the following issues:
period. Moreover, the experiments in [4] followed the guidelines described in this work. Based on the experiences acquired from hundreds of hours of WUSN experiments in this testbed, the details related to the development of an outdoor WUSN testbed are presented in this work. To the best of our knowledge, this is the first work that proposes guidelines for the development of a WUSN testbed to improve the accuracy and to reduce the time for WUSN experiments. The recommended practices in this work range from radio frequency (RF) measurements using sensor nodes to the use of practical techniques that significantly reduce the time to install and remove the sensor nodes in the underground setting. The main objective of this work is the proliferation of best practices in the area of WUSNs in the following issues:
-
(i)
the time reduction for the realization of WUSN experiments through the use of a WUSN testbed,
-
(ii)
the improvement of the accuracy,
-
(iii)
an easier and standardized way to compare results from experiments realized in different WUSN testbeds,
-
(iv)
establishment of a standard methodology for WUSN measurements.
The rest of this paper is organized as follows: In Section 2, an overview of a WUSN testbed and its physical layout are presented. In Section 3, diverse aspects to be controlled in a WUSN experiment, such as the digging process, the soil composition, the soil moisture, the antenna orientation, and the transitional region are discussed. In Section 4, detailed guidelines to preserve the quality and accuracy of the experiments, even when sensor nodes are used as RF measurement tools, are presented. The overall architecture of a WUSN testbed and the aspects of its software are provided in Section 5. The preparation for the experiments and the results of an outdoor WUSN testbed are presented in Section 6. Finally, the conclusions are discussed in Section 7.
2. WUSN Testbed Architecture
Three different communication links exist in WUSNs based on the locations of the sender and receiver nodes, as shown in Figure 1.

The three communication scenarios supported by the WUSN testbed: (a) underground-to-underground (UG2UG), (b) underground-to-aboveground (UG2AG), and (c) aboveground-to-underground (AG2UG) communication.
-
(i)
Underground-to-underground (UG2UG) Link: the communication occurs entirely using the soil medium, as illustrated in Figure 1(a).
-
(ii)
Underground-to-aboveground (UG2AG) Link: the sender is a buried sensor node and the receiver is an aboveground device, as illustrated in Figure 1(b).
-
(iii)
Aboveground-to-underground (AG2UG) Link: the sender is an aboveground device and the receiver is a buried sensor node, as illustrated in Figure 1(c).
Accordingly, a WUSN testbed must support experiments in these  communication scenarios. The testbed architecture for UG2UG experiments is presented in Section 2.1. The extension of the testbed to support aboveground nodes is discussed in Section 2.2.
communication scenarios. The testbed architecture for UG2UG experiments is presented in Section 2.1. The extension of the testbed to support aboveground nodes is discussed in Section 2.2.
2.1. UG2UG Testbed
A WUSN testbed must allow an easy configuration of the physical deployment aspects. As shown in Figure 1, these deployment parameters reflect the location of the sensor nodes. The parameter  , also called burial depth, is defined as the distance between the center of the antenna of the buried sensor node and the surface of the soil. The distance above the ground
, also called burial depth, is defined as the distance between the center of the antenna of the buried sensor node and the surface of the soil. The distance above the ground  , used in the UG2AG and AG2UG scenarios, is the distance between the center of the antenna of the aboveground device and the surface of soil. Finally, the parameter
, used in the UG2AG and AG2UG scenarios, is the distance between the center of the antenna of the aboveground device and the surface of soil. Finally, the parameter  is the horizontal internode distance between the sender and the receiver nodes. Therefore, from the communication perspective, the antenna is the element of interest. In fact, the actual locations of the sensor, processor, and transceiver modules are not considered in defining the physical distances of a WSUN testbed experiment, only the antenna. However, preliminary tests show that metallic objects nearby the antenna of a node can significantly impact the results of WUSN experiments. Therefore, the actual position of a node's module, such as a soil moisture sensor, may change the results, and this scenario must be avoided or informed in the report of the experiment.
is the horizontal internode distance between the sender and the receiver nodes. Therefore, from the communication perspective, the antenna is the element of interest. In fact, the actual locations of the sensor, processor, and transceiver modules are not considered in defining the physical distances of a WSUN testbed experiment, only the antenna. However, preliminary tests show that metallic objects nearby the antenna of a node can significantly impact the results of WUSN experiments. Therefore, the actual position of a node's module, such as a soil moisture sensor, may change the results, and this scenario must be avoided or informed in the report of the experiment.
Figure 2 illustrates the grid concept applied in a WUSN testbed mainly designed for UG2UG experiments. The grid concept is very important in wireless communication testbeds. The basic idea is to perform multiple simultaneous point-to-point (sender-receiver) tests, speeding up the overall time spent in an experiment. As shown in Figure 2(a), one of the sensors temporarily has the role of sender and it broadcasts a sequence of test messages. Only one node can be selected as a sender for each experiment. Therefore, the remaining nodes in Figure 2(a) are potential receivers. After the end of the test, it is possible to verify the results of the experiments consulting each receiver individually.

(a) The grid concept used to speed up the experiments in a WUSN testbed. (b) A case, where the grid can interfere with the results. (c) Ideal case for experiments and (d) an alternate grid solution.
However, the scheme in Figure 2(a) results in high interference since a node may be on the direct path between two other nodes as shown in Figure 2(b). An alternate solution is to perform experiments individually as shown in Figure 2(c), which eliminates any obstacles between sensor nodes. Therefore, it is clear that the original grid idea must be modified in underground settings to maintain the accuracy of WUSN experiments and also to provide the flexibility of having multiple simultaneous tests. A simple solution is shown in Figure 2(d). This new scheme proposes a direct line-of-sight (without obstacles) between the hole where the sender is located and the holes where the receivers are located. The difference is more clear when the top views of Figure 2(a) and Figure 2(d) are compared. With this new design, the grid imposes two constraints in the WUSN testbed.
-
(i)
A hole is designated only for the senders: the hole, which is used to place the sender node(s), that is, the sender hole, must have direct line-of-sight with all other holes. In other words, no other hole or obstacle can exist between the sender holes and the other holes. It is possible to have multiple senders in the same sender hole. However, only one sender can be active at a given moment.
-
(ii)
At the senders hole, no receivers are allowed: if receivers are placed at the same hole as the sender, one of them can be a potential communication obstacle to the other. For instance, if the nodes Sender A, Receiver 1, and Receiver 2 are buried, in this order, in the same hole, the Receiver 1 will be an obstacle for the propagation of waves from the Sender to the Receiver 2.
Based on the dimensions of the sensor nodes and the communication constraints empirically verified in [4], the physical layout for basic WUSN testbeds is illustrated in Figure 3. The layouts are presented in a top view, where each circle is a hole. The presented layouts consider the use of 10 cm-diameter holes and commodity WSN sensor nodes with a maximum transmit power of +10 dBm. Naturally, the distances can be modified if larger and more powerful sensor nodes are used. The first layout in Figure 3(a) is used for internode distance experiments. The 5 holes in the center are used by sender nodes and only one of these holes can contain an active sender for an experiment. The horizontal holes in Figure 3(a), with the exception of the central one, are assigned for receiver nodes. Multiple receivers holes can be active in an experiment. The holes at the right side of the central node are used for redundant receivers. As shown in Figure 3(a), the same internode distance is used for the receivers A and  , where the latter is used for redundancy in experiments. After the end of the experiment, the results of the receiver A are expected to be very close to the measurements from the sensor
, where the latter is used for redundancy in experiments. After the end of the experiment, the results of the receiver A are expected to be very close to the measurements from the sensor  , assuming they have the same burial depth. As shown in Figure 3(a), this first architecture provides:
, assuming they have the same burial depth. As shown in Figure 3(a), this first architecture provides:

WUSN testbed layouts for UG2UG communication: (a) The layout used to investigate the effects of the internode distance and (b) the layout used for transmission contention tests:  and
and  -sender cases.
-sender cases.
-
(i)
direct line-of-sight between sender and receiver without any artificial obstacle,
-
(ii)
simultaneous experiments for different internode distances and, optionally, different burial depths,
-
(iii)
high accuracy in the results through the redundancy in the measurements.
The use of multiple nodes in the same hole, as suggested in Figure 2(d), deserves special attention. In this case, the testbed would be actually based on a 3D-grid which is a natural option to speed up the experiments. However, the placement of a sensor nearby the antenna of another underground node can interfere with the experiment results. Preliminary tests are necessary to verify if this interference will potentially occur before deciding for the use of a 3D-grid in the underground setting. In the experiments in [4], the use of multiple nodes at the same hole was not possible due to the interference issues. Therefore, in that case, every hole in the layout contains only one sensor and the underground part of the testbed was constrained to a 2D-grid.
It is possible to extend the testbed in Figure 3(a) to support multiple senders at different holes. However, the complexity of this new layout can be pretty high, and the implementation of a unique and general purpose testbed can be very difficult. One alternate solution is to create additional testbeds for this kind of experiments. One example of application of this new testbed is the transmission contention experiments. In Figure 3(b), the layouts of the  -sender and
-sender and  -sender cases are shown.
-sender cases are shown.
2.2. Testbed Extension: Aboveground Nodes
UG2AG and AG2UG links are required for several functionalities of WUSNs, such as network management and data retrieval. Therefore, the WUSN testbed must also provide support for UG2AG and AG2UG experiments. As shown in Figure 3(a), the UG2UG testbed has  special holes for sender nodes and 20 holes for receivers. Extending the WUSN to aboveground experiments implies that the sender (or the receivers) will be located above the soil surface. Accordingly, the grid scheme can be adapted to this new scenario. The following guidelines are provided for extending the WUSN testbed for aboveground experiments.
special holes for sender nodes and 20 holes for receivers. Extending the WUSN to aboveground experiments implies that the sender (or the receivers) will be located above the soil surface. Accordingly, the grid scheme can be adapted to this new scenario. The following guidelines are provided for extending the WUSN testbed for aboveground experiments.
-
(i)
The surface of the paper pipe must be aligned with the soil surface, as shown in Figure 4(a).
-
(ii)
The propagation of the antenna cannot be disturbed by the paper pipes filled with soil (discussed in Section 3.1), as shown in Figure 4(b). The mentioned paper pipes can be used, but the antenna must be positioned in a way that it points to the direction of the aboveground device(s), as shown in Figure 4(a).
-
(iii)
The hole must have a direct line-of-sight (without obstacles) to the aboveground device(s), as shown in Figure 4(c).
-
(iv)
The aboveground nodes devices can be easily installed using a 10?cm-length buried
 PVC pipe in conjunction with a wood stake. It also possible to build a grid of aboveground devices, as shown in Figure 4(c).
PVC pipe in conjunction with a wood stake. It also possible to build a grid of aboveground devices, as shown in Figure 4(c).Figure 4 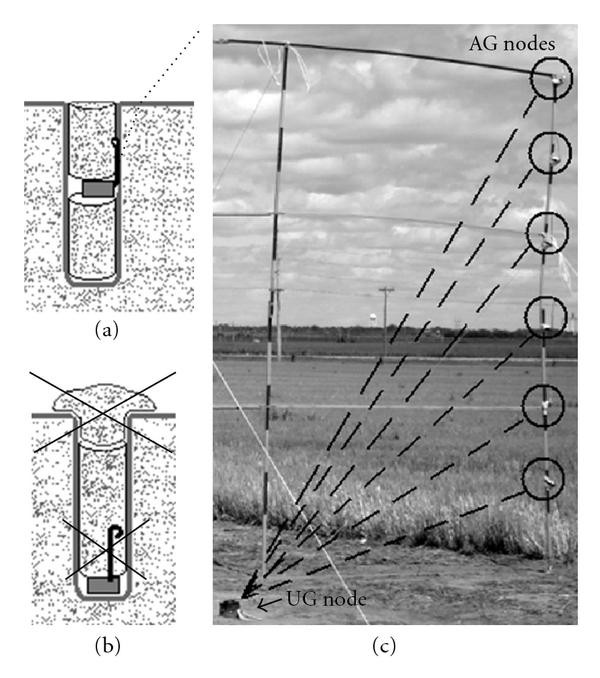
UG2AG and AG2UG experiments. (a) The antenna must be positioned in the direction of the aboveground device and without any obstacle. (b) Some aspects allowed for UG2UG experiments are not allowed for aboveground experiments. (c) Grid of aboveground nodes.
 PVC pipe in conjunction with a wood stake. It also possible to build a grid of aboveground devices, as shown in Figure
PVC pipe in conjunction with a wood stake. It also possible to build a grid of aboveground devices, as shown in Figure 
All the devices and schemes presented in this section speed up the realization of our experiments. Without these schemes, the same experiments would last more than  times. At the same time, the accuracy of these experiments is not compromised.
times. At the same time, the accuracy of these experiments is not compromised.
3. Factors That Impact Outdoor WUSN Testbeds
In this section, the factors that impact the realization of WUSN experiments are presented. The challenges of burying and unburying sensor nodes are presented, and the use of paper and plastic pipes is described in Section 3.1. The analysis of the soil texture and soil moisture of the WUSN testbed is included as an essential part of the results of the experiments in Section 3.2. The errors caused by the antenna orientation and the use of sensor nodes to make RF measurements are discussed in Sections 3.3 and 3.4. Finally, the issues related to the transitional region of WUSNs are presented in Section 3.5.
3.1. The Digging Process
Burying and unburying sensor nodes are very time-consuming tasks in underground settings. For instance, in our experimental testbed, almost  hours were necessary to dig a single 20 cm-diameter,
hours were necessary to dig a single 20 cm-diameter,  m-depth hole, even with the use of an electric power auger. Therefore, an initial consideration about the dimensions of the holes is necessary. Besides the time issue, the larger a hole is, the larger is the modification of the soil density at that area, and this parameter affects the signal attenuation caused by the soil [4, 6]. A second aspect is related to the depth of the hole. The majority of the WUSN applications will not require burial depths higher than 1 m [1, 4, 5, 7]. Therefore, the WSUN testbed considered in this section assumes a burial depth smaller than 1 m. The process of digging deeper holes is only feasible with special machines. On the other hand, for shallow holes, there are many simple and manual digging tools available in the market considering that the diameter of the hole is restricted to up
m-depth hole, even with the use of an electric power auger. Therefore, an initial consideration about the dimensions of the holes is necessary. Besides the time issue, the larger a hole is, the larger is the modification of the soil density at that area, and this parameter affects the signal attenuation caused by the soil [4, 6]. A second aspect is related to the depth of the hole. The majority of the WUSN applications will not require burial depths higher than 1 m [1, 4, 5, 7]. Therefore, the WSUN testbed considered in this section assumes a burial depth smaller than 1 m. The process of digging deeper holes is only feasible with special machines. On the other hand, for shallow holes, there are many simple and manual digging tools available in the market considering that the diameter of the hole is restricted to up  cm. In the case of our testbed, the required minimum diameter is 7.5 cm due to the dimensions of the sensor node. Therefore, 8 cm-diameter holes were dug with power augers. The difficulty to bury a sensor node also highlights an important aspect for the success of WUSN applications: the deployment of hundreds or thousands of these devices needs to be relatively simple. In this sense, sensor nodes with cylindrical form and a tiny diameter (
cm. In the case of our testbed, the required minimum diameter is 7.5 cm due to the dimensions of the sensor node. Therefore, 8 cm-diameter holes were dug with power augers. The difficulty to bury a sensor node also highlights an important aspect for the success of WUSN applications: the deployment of hundreds or thousands of these devices needs to be relatively simple. In this sense, sensor nodes with cylindrical form and a tiny diameter ( to 4 cm) are required.
to 4 cm) are required.
Besides the difficulty and the time spent in the process of burying and unburying sensor nodes, the repetition of an experiment is also a challenge. To place a sensor node and its antenna at the same place and orientation in a deeper hole is not an easy task. This issue is aggravated with the use of small holes, such as a 10 cm-diameter hole. To address these challenges, the use of paper and plastic (PVC) pipes is required. In our testbed, preliminary tests using Mica2 [8] motes at 433 MHz are realized to verify how the adoption of paper and plastic pipes would interfere in the results of the experiments [4]. The comparison between the results, with and without paper and plastic pipes, shows an additional attenuation ranging from 2 to 8 dB. These values correspond, respectively, to the use of paper pipes and different thicknesses of plastic pipes. These values are still considered small in comparison with the value of the soil attenuation which typically varies from  to 50 dB [4]. To obtain a smaller attenuation value due to the introduction of the plastic pipe, smaller thicknesses can be used. In Figure 5, the use of a paper pipe, made with a 55
to 50 dB [4]. To obtain a smaller attenuation value due to the introduction of the plastic pipe, smaller thicknesses can be used. In Figure 5, the use of a paper pipe, made with a 55  70 cm poster board, is illustrated. In this case, the variation caused by the paper pipe is smaller than 1.5 dB.
70 cm poster board, is illustrated. In this case, the variation caused by the paper pipe is smaller than 1.5 dB.

(a) The structure and installation of paper pipes . (b) Use of paper pipes in 10 cm-diameter and 90 cm-depth holes for a temporary WUSN testbed.
The paper/plastic pipe helps to preserve the physical structure of the hole for multiple experiments. However, to perform the experiments, the sensor should also be covered with soil. Therefore, the reuse of a hole for multiple experiments is still a problem. A possible solution for this issue is the use of paper pipes filled with soil. In our testbed, additional 7.5 cm-diameter paper pipes are used for this purpose. These new paper pipes contain the same soil which is taken out from the digging process. These pipes, with both ends sealed, can have different lengths, helping to make experiments for different burial depths.
3.2. Soil Texture and Soil Moisture
The characteristics of the soil have a strong influence on the signal attenuation [1, 4–7]. As a consequence, WUSN experiments realized without the characterization of the soil are incomplete. In parallel with the preparation of the testbed, soil samples must be collected and sent to a specialized laboratory for soil analysis. The soil texture analysis provided by the laboratory presents very important parameters to be added in all results from the testbed. In Table 1, the soil analysis from our testbed performed by a specialized laboratory [9] is presented as an example.
Besides the soil texture, the water content (WC), or soil moisture, is other parameter to be included in every WUSN experiment report. However, differently from the soil texture, which is very stable for the same site, the WC is dynamic and depends on the environment and the weather. Moreover, the WC also varies as a function of the burial depth [3, 10]. These facts are important because the WC can significantly modify the results of an experiment, as suggested in [3–5, 7].
There are two basic methods to measure the amount of water in the soil: soil water content and soil water potential measurements [10]. The soil water potential measurement, expressed in bars units, is related to the energy status of the soil water. Tensiometer and electrical resistance sensors are some examples of soil sensors that can be used to gather water potential measurements. This method provides a more realistic measurement of the actual plant water stress and, therefore, has a significant value for irrigation purposes. On the other hand, the soil water content measurement provides an effective measurement of the portion of water in the soil sample. This aspect has a direct relation with the dielectric properties of the soil [6] and, consequently, impacts the underground wireless communication behavior [3–5, 7].
The soil water content (WC) can be expressed in two forms: gravimetric water content (GWC) and volumetric water content (VWC). A method called oven drying method is usually used to calculate the GWC [10]. This method consists of separating and weighing a sample of the soil. Then, this soil sample is completely dried in an oven and it is weighed again. The difference in the weights divided by first measurement represents the VWC in the soil sample, a number varying from  to
to  . Having the GWC value, the VWC can be obtained by [10]
. Having the GWC value, the VWC can be obtained by [10]


where VWC and GWC are the volumetric water content and gravimetric water content of the soil sample, respectively,  is the soil density in g/cm3,
is the soil density in g/cm3,  is the water density (1 g/cm3 at
is the water density (1 g/cm3 at  ),
),  is the mass of the soil sample in g, and
is the mass of the soil sample in g, and  is the volume of the soil sample in cm3.
is the volume of the soil sample in cm3.
Despite its simplicity, the direct evaluation of the VWC using the gravimetric method is not practical for the WUSN testbed for three reasons. First, the gravimetric method implies that a soil sample must be regularly removed from the testbed and this continuous process is time-consuming and destructive. Second, the conversion of GWC to VWC given by (1) depends on the bulk soil density parameter. This density changes for different burial depths and its measurement requires additional attention [10]. As a result, the good accuracy of the GWC measurement can be compromised in the VWC conversion. Finally, it is not possible to have a significant number of measurements of the VWC on a long-term experiment. For instance, if we would like to analyze the effects of the rainfall over the WUSN communication, the presence of a person continuously taking soil samples would be required. Instead, the use of soil moisture sensors that can dynamically take VWC measurements is required in the testbed. Some examples of these sensors are the time domain reflectometer (TDR) and capacitance-based devices [10]. Recent work in WUSN shows the successful use a capacitance-based sensor, ECH2O EC-5 [11] sensor [3, 12, 13], for water content measurements.
The WC measurements must be collected frequently to confirm that the same WC value is present during the experiments. This is specially recommended when a set of experiments is partitioned into many different sessions and distinct days. This continuous need of taking WC measurements during a set of experiments is another reason for the use of soil moisture sensors as part of the testbed infrastructure. The soil texture and the WC must be informed together in the experiments reports. The comparisons between experiments realized in different testbeds are only feasible including with these parameters in the analysis.
3.3. Antenna Orientation
Usually, the antenna orientation is not a very critical factor for over-the-air wireless communication experiments. However, considering the extreme attenuation due to the soil propagation, the antenna orientation is an additional constraint to be considered in the deployment of WUSNs, specially for multihop underground networks, where the communication range varies based on the antenna orientation. Accordingly, the experiments in a WUSN testbed can be easily compromised if the antenna orientation is not carefully adjusted.
To illustrate the impacts of antenna orientation, experiments are performed by placing a sender and a receiver, both Mica2 motes [8], at different angles as shown in Figure 6(a) [4]. The vertical polarization of the antennas is specifically adopted because preliminary tests proved that it provided the best results for our WUSN testbed environment; however the explanation in this section also applies to other types of antenna polarization.

The scheme used to test the effects of the antenna orientation in the wireless underground communication [4]. Relative angles for the antennaPER versus relative angle for the antenna
The original antenna of a Mica2 mote is a standard one-quarter wavelength monopole antenna with 17 cm-length. It is well known that this type of antenna does not exhibit a perfect omni-directional radiation pattern. Therefore, it is expected that changes in the antenna orientation cause variations on the signal strength of the receiver node. These variations are specially significant when the underground scenario is considered. The experiments are performed at a transitional region (defined in Section 3.5), that is, nearby the boundaries of the underground communication range.
In Figure 6(b), the packet error rate (PER) is shown as a function of the node orientation. When the relative angle varies from 90° to 340°, the PER increases and the orientation of a node has a significant impact on the communication success. When the antenna orientation is between  and
and  , the communication between the nodes is not possible.
, the communication between the nodes is not possible.
To avoid the interference of the antenna orientation over the experiments results, it is important to choose a unique antenna orientation for all experiments in a WUSN testbed. In our experiments, only the 0° orientation (Figure 6(a)) is used in order to eliminate the effects of the antenna orientation. Naturally, for every combination of sensor node type and its antenna, different antenna polarizations and orientations can be adopted as the default configuration for all experiments. Accordingly, an experiment similar to the one shown in Figure 6 must be performed to maintain the accuracy of the results and also to provide the recommendation of the best configuration for the sensor deployment.
3.4. Misalignment of RF Measurements
In an ideal wireless testbed, the best accurate tools are selected to be used as the instrumentation for the RF measurements. However, this is not usually the case for WUSN testbeds for two reasons. First, it is a common approach in WUSNs to use the sensor nodes to cooperate and provide the most reliable and efficient communication solution. Therefore, sensor nodes are expected to be also used as network instrumentation. Second, if a special and more accurate instrument, such as a spectrum analyzer, is used at the receiver side of the experiment, the grid idea cannot be applied and multiple tests must be performed one-by-one. The natural consequence is the increase of the time to conclude the experiments.
The grid-based testbed layout involves the measurements from many sensor nodes. Therefore, it is expected that differences between the RF measurements from different sensor nodes cause significant accuracy issues. In the context of a WSUN testbed, we refer to this issue as misalignment problem. A node is defined to be aligned with a given set of nodes if
-
(i)
its PER varies at most
 % from the average PER calculated for the set of nodes,
% from the average PER calculated for the set of nodes, -
(ii)
its RSSI average varies at most +/
 dB from the average RSSI for the set of nodes.
dB from the average RSSI for the set of nodes.
 % from the average PER calculated for the set of nodes,
% from the average PER calculated for the set of nodes, dB from the average RSSI for the set of nodes.
dB from the average RSSI for the set of nodes.Usually, the nodes present different receiver sensitivities [8]. This fact can cause the mentioned misalignment problem and the accuracy of the experiments can be compromised. Considering this, a balanced approach adopted in a WUSN testbed is to continue using the sensor nodes as part of the RF instrumentation, but selecting only a subset of the nodes. The selected nodes for an experiment are the ones previously qualified to perform the RSS measurements. Therefore, before using the sensor nodes for the WUSN experiments, they are tested in typical WSN scenarios, using over-the-air tests, in a process called qualification test. The reason for this test is explained by the following example.
Suppose that we want to test  receiver nodes, all placed in the same hole at different burial depths. The results from this experiment can only be validated if these nodes present similar RSS measurements for an over-the-air test, using the same internode distance. If this is the case, the distinct underground measurements provided by the nodes at different burial depths are actually related to the burial depth effects and not a difference caused by their receiver sensitivities.
receiver nodes, all placed in the same hole at different burial depths. The results from this experiment can only be validated if these nodes present similar RSS measurements for an over-the-air test, using the same internode distance. If this is the case, the distinct underground measurements provided by the nodes at different burial depths are actually related to the burial depth effects and not a difference caused by their receiver sensitivities.
As an example of a qualification test, one sensor node is assigned with the role of broadcasting (over the air) a total of  packets,
packets,  bytes each, to a set of nodes located in the same physical position and exactly with the same antenna orientation. The transmit power used by the sender node must be small in order to allow the RSS/PER comparison at critical conditions. Usually, we use
bytes each, to a set of nodes located in the same physical position and exactly with the same antenna orientation. The transmit power used by the sender node must be small in order to allow the RSS/PER comparison at critical conditions. Usually, we use  10 dBm as the transmit power of the sender and 5 m as the internode distance between the sender and the set of nodes under qualification process. After the test, the results are collected from each node and only the subset of nodes that have similar PER and average RSSI, as previously defined, are selected to participate in the experiment. However, as expected, this kind of approach has at least two drawbacks. First, the process is very time-consuming and must be repeated every new day/session of experiments. Second, usually it is not possible to use all the available nodes for the experiment, which means that the grid is constrained by the number of qualified nodes. For instance, in our experiments, using Mica2 motes, generally only
10 dBm as the transmit power of the sender and 5 m as the internode distance between the sender and the set of nodes under qualification process. After the test, the results are collected from each node and only the subset of nodes that have similar PER and average RSSI, as previously defined, are selected to participate in the experiment. However, as expected, this kind of approach has at least two drawbacks. First, the process is very time-consuming and must be repeated every new day/session of experiments. Second, usually it is not possible to use all the available nodes for the experiment, which means that the grid is constrained by the number of qualified nodes. For instance, in our experiments, using Mica2 motes, generally only  % of the available nodes were qualified for each day of experiments. Surprisingly, the qualified nodes are not always the same nodes. The use of sensor nodes as instrumentation for RF measurements requires a huge effort in order to maintain the accuracy of the results. Also, the total number of nodes to be available for a WUSN testbed is significantly higher than the actual number of nodes used in the experiments.
% of the available nodes were qualified for each day of experiments. Surprisingly, the qualified nodes are not always the same nodes. The use of sensor nodes as instrumentation for RF measurements requires a huge effort in order to maintain the accuracy of the results. Also, the total number of nodes to be available for a WUSN testbed is significantly higher than the actual number of nodes used in the experiments.
3.5. Transitional Region of WUSNs
It is well known that in traditional wireless communication (air channel), there is a region where the reliability of the signal varies, until the point where the communication ceases. It was reported that this issue is highly accentuated in WSNs and this critical region is called the transitional region [14]. However, results from preliminary UG2UG experiments show that the underground transitional region is significantly smaller than its air channel counterpart [4]. As already commented, the main problem with wireless underground communication is the very high signal attenuation caused by the soil [1, 4, 5, 7]. At the same time, usually sensor nodes present low power RF transceivers. The combination of these factors results in a very small width of the transitional region. This fact causes problems in realizing WUSN experiments and it is one of the main reasons for the small number of experiments in this area.
The identification of the transitional region in a WUSN environment, which defines the limits of the communication range, is tied to the burial depth of the nodes, the soil texture, and the WC. For instance, in some of our UG2UG experiments, the transitional region presented a width of less than  % of the maximum internode distance. More specifically, with a maximum internode distance of 100 cm and a transmit power of +5 dBm, the transitional region is located between 85 cm and 95 cm [4]. As expected, such small distance is very critical: an imperceptible slight movement in one direction, when burying the node, causes the change from a good communication region to a transitional region. Therefore, if the tests are being realized very close to the transitional region, a careless manipulation of the sensors can cause significant interferences in the results.
% of the maximum internode distance. More specifically, with a maximum internode distance of 100 cm and a transmit power of +5 dBm, the transitional region is located between 85 cm and 95 cm [4]. As expected, such small distance is very critical: an imperceptible slight movement in one direction, when burying the node, causes the change from a good communication region to a transitional region. Therefore, if the tests are being realized very close to the transitional region, a careless manipulation of the sensors can cause significant interferences in the results.
Considering all the presented facts, the recommendation is to limit all the experiments to a secure region which is not the transitional region. Restricting the experiments in a secure region is a way to preserve the quality and accuracy of the WUSN experiments. For instance, if WC experiments are realized in the transitional region, it will not be clear if the RSS and PER results uniquely reflect the WC effects or if the results are also affected by the instabilities of the transitional region. On the other hand, for instance, experiments realized at  % of the maximum internode distance present very stable results and the repeatability and comparisons between experiments are feasible in this secure region [4]. Naturally, the exception for this guideline is when the maximum internode distance and the transitional region are the aspects under investigation in the experiments.
% of the maximum internode distance present very stable results and the repeatability and comparisons between experiments are feasible in this secure region [4]. Naturally, the exception for this guideline is when the maximum internode distance and the transitional region are the aspects under investigation in the experiments.
Many aspects or variables that can potentially interfere with the quality of the WUSN experiments are considered in this section. Guidelines are provided to minimize the issues or completely eliminate the interference of one or multiple variables. The qualification phase is particularly very important due to the well known differences in the transceiver performances of low-cost sensor nodes. However, even with a qualified set of nodes, the interpretation of the results can still be affected by the way the RF measurements are realized. Guidelines to realize such measurements are provided in the next section.
4. Standardized RF Measurements
A WUSN testbed is generally used to provide the infrastructure necessary for the realization of comparisons between experimental results and the predictions made by theoretical models. However, it has been reported that sensor nodes are being used to make RF measurements, usually the RSS [14]. This is usually necessary and desirable because many communication protocols take advantage of the use of the sensor node as an RF measurement tool to make decisions related to multihop schemes, topology, localization, and so forth. However, it is possible to identify some issues related to the use of sensor nodes for such measurements. In Section 4.1, a methodology to avoid the issues caused by the limitations of the sensor node receiver circuitry is presented. In Section 4.2, guidelines to correctly estimate the path loss exponent are provided.
4.1. Clipping Effect
Wireless communication channel models usually use empirically determined parameters, such as path loss exponent (PLE). In a WUSN testbed scenario, the sensor nodes can be used to take RF measurements for the estimation of such parameters. However, these measurements can introduce distortions in the results. The following case involving Mica2 motes was observed in our experiments and illustrates the problem.
Based on the well known Friis free space propagation model [15], it is expected that an increase in the internode distance between sender and receiver corresponds to a decrease in the received signal strength. This scenario is illustrated in Figure 7(a), where RSS are reported for different distances between the sender and the receivers. However, when the transmit power level of the sender node increases from +5 dBm to +10 dBm, the RSS measurements do not match the 5 dB increase, as illustrated in Figure 7(b). We refer to this issue as the clipping effect. Consequently, the clipping effect creates distortions in the PLE estimation. The PLE expresses the rate at which the signal power decays as a function of the distance [15] and it is an important input parameter in many WSN/WUSN communication models [14]. This parameter is usually calculated based on many RSS measurements performed by the sensor nodes. If the PLE estimation is not accurate, there will be distortions between the estimations of the communication model and the experimental data provided by the testbed.

(a) Normal measurements. (b) The clipping effect.Transmit power level = +5 dBmTransmit power level = +10 dBm
The clipping effect is caused by the limitations of the receiver circuitry of the sensor node. In Figure 8, a typical RF circuitry of a sensor node is shown. If a strong signal is received above a certain limit specified by the manufacturer of the sensor, a limiter circuit will operate and a maximum RSS will be informed as the RSSI level. Accordingly, different signal levels will correspond to the same informed RSSI and this is the clipping effect.

Typical receiver circuitry of a sensor node.
The clipping effect is challenging because it depends specifically on the hardware. Moreover, the nominal value of the maximum RSS informed by the manufacturer may also vary as mentioned in Section 3.4. The consequences of the clipping effect on a WSN/WUSN testbed are as follows.
-
(i)
Incorrect interpretation of the testbed data. The communication model can predict a RSS value and the experimental data can show a smaller result. If this smaller value is exactly the maximum nominal RSSI of the receiver, probably this is not a model mismatch.
-
(ii)
Inaccuracy in the model prediction. If the communication model is using the testbed to obtain certain empirical parameters, such as PLE, the results of the model will be negatively affected by these incorrect measurements.
Although the first mentioned consequence is not critical because it is only related to the way the experimental data from the testbed is analyzed, the second consequence must be avoided or solved. Therefore, in the case of PLE estimation, only combinations of transmit power levels and internode distances that are clearly not affected by the clipping effect can be used. This guideline is specially important when defining the reference distance for PLE measurements [15]. In the next section, guidelines to calculate PLE is presented with a methodology to choose the appropriate reference distance to avoid the mentioned clipping effect.
4.2. Path Loss Exponent Estimation Using Sensor Nodes
The PLE is an essential input parameter in wireless communication models. In this section, a methodology is presented to estimate the PLE using sensor nodes in a WUSN testbed.
Select the reference distance . The typical approach to determine the received power from the receiver node's perspective, located a distance
. The typical approach to determine the received power from the receiver node's perspective, located a distance  from the sender node, is the use of the well known Friis equation related to the free space propagation model. However, the application of this equation assumes the availability of detailed information about the antennas gain/losses, the overall losses due to transmission line attenuation, filter losses, and so forth, Another more practical approach to predict the received power at a given distance
from the sender node, is the use of the well known Friis equation related to the free space propagation model. However, the application of this equation assumes the availability of detailed information about the antennas gain/losses, the overall losses due to transmission line attenuation, filter losses, and so forth, Another more practical approach to predict the received power at a given distance  from the sender is the use of direct measurements in the radio environment [15]. For this approach, a reference distance
from the sender is the use of direct measurements in the radio environment [15]. For this approach, a reference distance from the sender node is chosen. This distance
from the sender node is chosen. This distance  must be determined considering two simultaneous constraints
must be determined considering two simultaneous constraints
-
(i)
 must lie in the far-field (Fraunhofer) region. The far-field region is defined as the region beyond the far-field distance
must lie in the far-field (Fraunhofer) region. The far-field region is defined as the region beyond the far-field distance  which is defined by [15]
which is defined by [15] (3)
(3)where
 is the largest physical linear dimension of the antenna and
is the largest physical linear dimension of the antenna and  is the wavelength of the RF wave in meters. For instance, for the Mica2 node operating at 433 MHz,
is the wavelength of the RF wave in meters. For instance, for the Mica2 node operating at 433 MHz,  is approximately 0.17 m and, therefore,
is approximately 0.17 m and, therefore,  is 8.3 cm. In this case,
is 8.3 cm. In this case,  must be greater than 8.3 cm.
must be greater than 8.3 cm.
 must lie in the far-field (Fraunhofer) region. The far-field region is defined as the region beyond the far-field distance
must lie in the far-field (Fraunhofer) region. The far-field region is defined as the region beyond the far-field distance  which is defined by [
which is defined by [
 is the largest physical linear dimension of the antenna and
is the largest physical linear dimension of the antenna and  is the wavelength of the RF wave in meters. For instance, for the Mica2 node operating at 433 MHz,
is the wavelength of the RF wave in meters. For instance, for the Mica2 node operating at 433 MHz,  is approximately 0.17 m and, therefore,
is approximately 0.17 m and, therefore,  is 8.3 cm. In this case,
is 8.3 cm. In this case,  must be greater than 8.3 cm.
must be greater than 8.3 cm.-
(i)
 must be smaller than any distance d used in the deployment of the nodes (
must be smaller than any distance d used in the deployment of the nodes ( ). For instance, for the over-the-air path of the UG2AG/AG2UG links using Mica2, it is usual to consider
). For instance, for the over-the-air path of the UG2AG/AG2UG links using Mica2, it is usual to consider  = 1 m because the minimum internode distance between the sensors is typically higher than 1 m.
= 1 m because the minimum internode distance between the sensors is typically higher than 1 m.
 must be smaller than any distance d used in the deployment of the nodes (
must be smaller than any distance d used in the deployment of the nodes ( ). For instance, for the over-the-air path of the UG2AG/AG2UG links using Mica2, it is usual to consider
). For instance, for the over-the-air path of the UG2AG/AG2UG links using Mica2, it is usual to consider  = 1 m because the minimum internode distance between the sensors is typically higher than 1 m.
= 1 m because the minimum internode distance between the sensors is typically higher than 1 m.After selecting a value for the reference distance  , the next step is to setup the sender at its minimum transmit power and collect the RSS measurements at the receiver. An additional RSS measurement is taken considering at this time the maximum transmit power. The difference between both measurements must be approximately the nominal difference between the maximum and minimum transmit power levels used. If this goal is not achieved, a higher value for
, the next step is to setup the sender at its minimum transmit power and collect the RSS measurements at the receiver. An additional RSS measurement is taken considering at this time the maximum transmit power. The difference between both measurements must be approximately the nominal difference between the maximum and minimum transmit power levels used. If this goal is not achieved, a higher value for  must be chosen and the above tests must be repeated. In the experiments reported in Section 6, the distance
must be chosen and the above tests must be repeated. In the experiments reported in Section 6, the distance  is 10 m. Any RSS measurement for internodes distances smaller than 10 m will have an error due to the nature of the RF instrumentation used (the sensor node itself). However, if a spectrum analyzer is used, the reference distance
is 10 m. Any RSS measurement for internodes distances smaller than 10 m will have an error due to the nature of the RF instrumentation used (the sensor node itself). However, if a spectrum analyzer is used, the reference distance  = 1 m could be adopted without any loss of accuracy. Naturally, the value for
= 1 m could be adopted without any loss of accuracy. Naturally, the value for  will vary for different models of sensor nodes and their antennas. Moreover, the use of multiple receivers will improve the quality of the results in the procedures described in this section.
will vary for different models of sensor nodes and their antennas. Moreover, the use of multiple receivers will improve the quality of the results in the procedures described in this section.
Take RSS measurements for distances . Configure the maximum transmit power level at the sender and take many RSS measurements for internode distances higher than
. Configure the maximum transmit power level at the sender and take many RSS measurements for internode distances higher than  . For our experiments with Mica2 motes, using +10 dBm for the transmit power, two additional distances are used for the RSS measurements:
. For our experiments with Mica2 motes, using +10 dBm for the transmit power, two additional distances are used for the RSS measurements:  = 15 m and
= 15 m and  = 20 m.
= 20 m.
Apply a linear regression technique to estimate PLE . Using the following equation and applying Minimum Mean Square Error (MMSE) technique [15], it is possible to estimate PLE (
. Using the following equation and applying Minimum Mean Square Error (MMSE) technique [15], it is possible to estimate PLE ( ) to be used by the wireless communication model:
) to be used by the wireless communication model:

where  is the measured RSS for each measurement instance
is the measured RSS for each measurement instance  .
.
Even if the PLE is not expected to be used, the approach observed in the presented methodology represents the set of best practices for RF measurements using sensor nodes in generic WSNs. In this way, any parameter to be used in a communication model which is based on RSS measurements of sensor nodes must follow a similar approach aiming the accuracy of the investigated model. The guidelines presented in this section can be applied to any WSN experiment. In fact, their relevance with this work is mostly related to the air path of the UG2AG and AG2UG experiments.
5. WUSN Testbed Software Architecture
A simple and effective software architecture to be used in WUSN testbeds is presented in this section. The software architecture is illustrated in Figure 9. One node, called manager, sends the configuration data for the experiment to a node called the sender. The configuration data must include the following parameters: transmit power level, delay between the messages, size of each message, and the total number of messages for the experiment. In the Figure 10, a screenshot of our WUSN testbed software running in a laptop is shown.

Software architecture of the WUSN testbed. (a) The manager sends the configuration to the sender. (b) The sender starts the experiment and (c) informs the conclusion. (d), (e) The manager captures the results.

A screenshot of the WUSN testbed software running in a laptop.
After receiving the configuration data from the manager, the sender broadcasts the messages. After the broadcasting period, the sender informs the manager node, via radio channel, that it finished this phase. At this moment, the operator of the experiment can request the results from each receiver node via radio channel. It is also possible to select multiple senders to start a transmission contention experiment.
The software in the manager node stores the configuration data for a given experiment, the manual annotations from the operator for that experiment, and the results from each receiver in a local file. If a receiver node receives a request for the results of an experiment but it did not have anything in its buffer, it returns a message to the manager informing no results, that is, packet error rate (PER) =  %. After sending the results to the manager, the receiver erases its buffer. Also, if the receiver receives messages from a new experiment, it automatically erases the previous results which were not requested by the manager.
%. After sending the results to the manager, the receiver erases its buffer. Also, if the receiver receives messages from a new experiment, it automatically erases the previous results which were not requested by the manager.
For the realization of long-term experiments, that is, experiments that are extended for a longer period of time, such as  hours, some modifications in the previous architectural scheme are necessary. First, the operator configures the experiment informing its long-term feature. Then, a special message is sent from the manager to the sender node. This special message informs the sender that it must broadcast messages with a higher interval, for example, every minute. The message broadcasted by the sender to the receivers also has the information regarding the long-term experiment. Accordingly, the receivers will store the results into their Flash memories due to the fact that the RAM memory is not usually large enough to buffer all the results. Finally, the process of capturing the results must also be modified for the long-term experiments. If the radio channel is used for the transfer of long-term results, the process could take hours to finish. The solution is to have each receiver directly connected to the computer acting as the manager, when the dump of the experiment results is started. In fact, this is the only situation where a cable (usually USB or serial) is necessary in the WUSN testbed.
hours, some modifications in the previous architectural scheme are necessary. First, the operator configures the experiment informing its long-term feature. Then, a special message is sent from the manager to the sender node. This special message informs the sender that it must broadcast messages with a higher interval, for example, every minute. The message broadcasted by the sender to the receivers also has the information regarding the long-term experiment. Accordingly, the receivers will store the results into their Flash memories due to the fact that the RAM memory is not usually large enough to buffer all the results. Finally, the process of capturing the results must also be modified for the long-term experiments. If the radio channel is used for the transfer of long-term results, the process could take hours to finish. The solution is to have each receiver directly connected to the computer acting as the manager, when the dump of the experiment results is started. In fact, this is the only situation where a cable (usually USB or serial) is necessary in the WUSN testbed.
Each broadcasted message in a given experiment has a sequence number. When the receiver receives that message, it saves in its buffer a summary of the message: its sequence number and the RSSI level related to the reception of the message. The RSSI information is provided by the transceiver of the sensor node as previously discussed in Section 4. Therefore, the summary of the message has exactly the same size in the receiver's buffer irrespective of the size of the message. The sequential numbers are used to identify if the loss of packets occur. Therefore, this observation can help to identify if the experiment suffered interference during its realization. If this is the case, the experiment can be promptly repeated or the source of interference can be identified.
6. Experiment Setup and Results
In this section, the details of the experiment preparation phase are presented. Also, the results of WUSN experiments, which are performed according to the proposed WUSN testbed and guidelines, are presented. Related to the preparation of a WUSN experiment, the following aspects must be known a priori.
-
(i)
Soil texture. This evaluation is realized once, for a given testbed location. The soil texture report must be done for different depths, as shown in Table 1.
-
(ii)
Water content (WC). This evaluation must be frequently performed as mentioned in Section 3.2. Moreover, it is very important to know the values of WC for different burial depths of the sensors to be tested.
-
(iii)
Attenuation due to the use of paper/plastic pipes. This evaluation is realized once, when the WUSN testbed is being built. The fixed average RSS difference between the results with and without the pipes are recorded. If they cannot be neglected, all the RSS results from the experiments must be adjusted accordingly.
-
(iv)
Default antenna orientation. This evaluation is realized once, for a given model of sensor node and its antenna. As mentioned in Section 3.3, the best antenna orientation are found and fixed for all experiments with that sensor.
-
(v)
Transitional region. The range of this value will change as a function of the soil composition, WC, frequency, and transmit power. It is necessary to know, a priori, the different values for this region according to the mentioned parameters. Therefore, experiments in the transitional region must be avoided when trying to analyze a specific aspect of the WUSN communication, as explained in Section 3.5.
The first step in the preparation for a WUSN experiment is the qualification test, exemplified in Section 3.4. After having the set of nodes to be used, the next step is the assignment of the roles for the sensor nodes. Considering that the manager node does not interfere on the results because it only triggers the start of the experiments and captures the results, the manager node can be elected randomly from the set of available nodes and there is no need to change its role. The node presenting smaller variance in its qualifying results must be selected as the sender. The same sender node can be used for all experiments in a single session. However, the use of the same sender node for different experiments sessions, for example, different days, is not recommended. As expected, the remaining qualified nodes can act as receivers. After the preparation phase, the WUSN experiments can be performed.
The rest of this section is composed of the presentation and the analysis of the results of WUSN experiments. These results are presented as examples of the successful use of the WUSN testbed and its related guidelines. For more detailed analysis of the results, the reader is referred to [4]. An analysis of the soil texture of the testbed environment was made by a specialized laboratory [9] and the results are shown in Table 1. The experimental results are divided into five classes: UG2UG, UG2AG, AG2UG, WC effects, and long-term (24 hours) experiments. All the experiments were realized with a 40 cm burial depth. The results of the first  classes of experiments are shown in Figure 11 and the Table 2 complements the results. In this table, the maximum internode distances for a PER smaller than
classes of experiments are shown in Figure 11 and the Table 2 complements the results. In this table, the maximum internode distances for a PER smaller than  % are shown. The results of the last
% are shown. The results of the last  classes of experiments are shown in Figure 12.
classes of experiments are shown in Figure 12.
 %.
%.
WUSN testbed results with commodity WSN sensor nodes. RSS versus horizontal internode distance  .Underground-to-underground (UG2UG) experiment [4]. Burial depths of the sender and the receiver:
.Underground-to-underground (UG2UG) experiment [4]. Burial depths of the sender and the receiver:  = 40 cm.Underground-to-aboveground (UG2AG) experiment. Burial depth of the sender:
= 40 cm.Underground-to-aboveground (UG2AG) experiment. Burial depth of the sender:  = 40 cm. Receiver's height:
= 40 cm. Receiver's height:  =
=  .Aboveground-to-underground (AG2UG) experiment. Burial depth of the receiver:
.Aboveground-to-underground (AG2UG) experiment. Burial depth of the receiver:  = 40 cm. Sender's height:
= 40 cm. Sender's height:  =
=  .
.

WUSN testbed results (UG2UG) with commodity WSN sensor nodes. RSS for dry and wet soil scenarios. Comparison between underground and over-the-air wireless communication.Effects of soil moisture over underground communication [4]. Burial depths of the sender and the receiver:  = 40 cm. Internode distance:
= 40 cm. Internode distance:  = 30 cm.Wireless underground communication channel: high stability [4]. Burial depths of the sender and the receiver:
= 30 cm.Wireless underground communication channel: high stability [4]. Burial depths of the sender and the receiver:  = 40 cm. Internode distance:
= 40 cm. Internode distance:  = 50 cm. Transmit power: +10 dBm.
= 50 cm. Transmit power: +10 dBm.
In Figure 11(a), the results of UG2UG experiments are presented [4]. For this experiment and the next 2, the RSS values are shown as a function of the horizontal internode distance for different transmit power levels. The variance of the RSS values is also provided. The clipping effect mentioned in Section 4 is observed in Figure 11(a). For a transmit power of +10 dBm, the RSS reported is the same as the maximum RSS informed by the manufacturer of the Mica2 mote [8]. As shown in Figure 11(a) and in Table 2, the maximum internode distance is found around  and 90 cm for transmit powers of +
and 90 cm for transmit powers of + and +10 dBm, and 50 cm for
and +10 dBm, and 50 cm for  and 0 dBm. These results show that the transitional region, discussed in Section 3.5, is also a function of the transmit power of the sender.
and 0 dBm. These results show that the transitional region, discussed in Section 3.5, is also a function of the transmit power of the sender.
In Figure 11(b), the results of UG2AG experiments are shown. The receiver is positioned at the soil surface ( = 0). As shown in Figure 11(b) and in Table 2, the maximum internode distance is found to be between
= 0). As shown in Figure 11(b) and in Table 2, the maximum internode distance is found to be between  and 3 m, depending on the transmit power level. The results from AG2UG experiments are shown in Figure 11(c). The sender is positioned at the soil surface (
and 3 m, depending on the transmit power level. The results from AG2UG experiments are shown in Figure 11(c). The sender is positioned at the soil surface ( = 0). As shown in Figure 11(c) and in Table 2, the maximum internode distance is found to be between
= 0). As shown in Figure 11(c) and in Table 2, the maximum internode distance is found to be between  and 90 cm, depending on the transmit power level. These results are in accordance with the extreme attenuation suffered by the signal as shown in Figure 11(c) and due to the fact that the sensitivity of the Mica2 mote is around
and 90 cm, depending on the transmit power level. These results are in accordance with the extreme attenuation suffered by the signal as shown in Figure 11(c) and due to the fact that the sensitivity of the Mica2 mote is around  95 dBm [8]. Since these experiments are realized in the transitional region, the realization of them are challenging. The use of redundant nodes, as shown in Figure 2, is specially recommended in this kind of scenario.
95 dBm [8]. Since these experiments are realized in the transitional region, the realization of them are challenging. The use of redundant nodes, as shown in Figure 2, is specially recommended in this kind of scenario.
In Figure 12(a), the effects of the soil moisture on the underground communication can be observed. The RSS values are shown as a function of the transmit power level for two soil conditions: dry (GWC = 11%) and wet (GWC = 18%). The GWC measurements followed the guidelines explained in Section 3.2. The horizontal internode distance is 30 cm and the nodes are buried at a depth of 40 cm, which is the default burial depth for all experiments mentioned here. The PER is below  % in all cases. As shown in Figure 12(a), for a transmit power of
% in all cases. As shown in Figure 12(a), for a transmit power of  3 dBm, the additional attenuation caused by the higher WC is almost 20 dB. Using a higher transmit power, it is possible to cancel the adverse effects of the WC. Applying these results to the WUSN testbed, it is clear that even small variations of WC can significantly alter the results of the experiments. Therefore, a careful and continuous control of the WC in a WUSN testbed is essential.
3 dBm, the additional attenuation caused by the higher WC is almost 20 dB. Using a higher transmit power, it is possible to cancel the adverse effects of the WC. Applying these results to the WUSN testbed, it is clear that even small variations of WC can significantly alter the results of the experiments. Therefore, a careful and continuous control of the WC in a WUSN testbed is essential.
In the last experiment, the temporal characteristics of the wireless underground channel are investigated. Accordingly, a  -hour experiment is performed with the following parameters: the horizontal internode distance is 50 cm and the transmit power is +10 dBm. For comparison, the same experiment is repeated over-the-air in an indoor environment with an internode distance of 5 m and a transmit power of +10 dBm. In Figure 12(b), the RSS values are shown as a function of time. The PER values are omitted because they are extremely low, never higher than
-hour experiment is performed with the following parameters: the horizontal internode distance is 50 cm and the transmit power is +10 dBm. For comparison, the same experiment is repeated over-the-air in an indoor environment with an internode distance of 5 m and a transmit power of +10 dBm. In Figure 12(b), the RSS values are shown as a function of time. The PER values are omitted because they are extremely low, never higher than  % [4]. Each data point shows the average of
% [4]. Each data point shows the average of  minutes of RSS information, which corresponds to
minutes of RSS information, which corresponds to  packets. In Figure 12(b), the confidence intervals of the RSS are also shown along with the average values for each point as well as the results of the over-the-air experiments. As shown in Figure 12(b), the maximum variation of the signal strength is around 1 dB. Compared to the over-the-air communication, underground wireless channel exhibits a stable characteristic with time. To perform this kind of long-term experiment, a special attention to the battery level is necessary. We used special battery packs for both sender and receiver nodes to prevent errors caused by the battery level. Also, observe that the experiment is located in a secure region (Section 3.5), allowing a clear analysis of the wireless underground channel stability under normal conditions.
packets. In Figure 12(b), the confidence intervals of the RSS are also shown along with the average values for each point as well as the results of the over-the-air experiments. As shown in Figure 12(b), the maximum variation of the signal strength is around 1 dB. Compared to the over-the-air communication, underground wireless channel exhibits a stable characteristic with time. To perform this kind of long-term experiment, a special attention to the battery level is necessary. We used special battery packs for both sender and receiver nodes to prevent errors caused by the battery level. Also, observe that the experiment is located in a secure region (Section 3.5), allowing a clear analysis of the wireless underground channel stability under normal conditions.
7. Conclusions
The development of an outdoor WUSN testbed and the realization of WUSN experiments are challenging. This work provides a set of guidelines that result in a balanced approach between high accuracy and a practical implementation of a WUSN testbed. The basic approach behind the proposed guidelines is the identification and elimination/mitigation of each variable which significantly affects the experiment results.
A WUSN testbed architecture is presented and aspects such as physical layout and software are discussed. The use of paper and plastic pipes are considered in detail, explaining the advantages of these devices in the process of burying and unburying sensor nodes. The influences of the antenna orientation and the soil moisture are highlighted. The importance of the qualification tests and procedures to identify the transitional region in a WUSN are discussed. Finally, results from experiments with the WUSN testbed are provided. The analysis of the results exemplifies the relation between the application of the guidelines proposed in this work with the accuracy of the results.
The ultimate goal of this work is to contribute to the efforts in modeling the wireless underground communication completely and developing simulation environments. To achieve this objective, an accurate outdoor WUSN testbed is essential for the evaluation of the theoretical communication models for WUSNs.
References
Akyildiz IF, Stuntebeck EP: Wireless underground sensor networks: research challenges. Ad Hoc Networks 2006, 4(6):669-686. 10.1016/j.adhoc.2006.04.003
Bogena HR, Huisman JA, Meier H, Rosenbaum U, Weuthen A: Hybrid wireless underground sensor networks: quantification of signal attenuation in soil. Vadose Zone Journal 2009, 8(3):755-761. 10.2136/vzj2008.0138
Tiusanen J: Wireless soil scout prototype radio signal reception compared to the attenuation model. Precision Agriculture 2009, 10(5):372-381. 10.1007/s11119-008-9096-7
Silva AR, Vuran MC: Empirical evaluation of wireless underground-to-underground communication in wireless underground sensor networks. Proceedings of the 5th IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS '09), June 2009, Marina del Rey, Calif, USA, Lecture Notes in Computer Science 5516: 231-244.
Li L, Vuran MC, Akyildiz IF: Characteristics of underground channel for wireless underground sensor networks. Proceedings of the Annual Mediterranean Ad Hoc Networking Workshop (Med-Hoc-Net '07), June 2007, Corfu, Greece
Peplinski N, Ulaby F, Dobson M: Dielectric properties of soils in the 0.3–1.3-GHz range. IEEE Transactions on Geoscience and Remote Sensing 1995, 33(3):803-807. 10.1109/36.387598
Akyildiz IF, Sun Z, Vuran MC: Signal propagation techniques for wireless underground communication networks. Physical Communication 2009, 2(3):167-183. 10.1016/j.phycom.2009.03.004
Crossbow Mica2, Micaz, and IRIS motes http://www.xbow.com/
Ward Laboratories http://wardlab.com/
Gardner WH: Water content. In Methods of Soil Analysis—Part 1. 2nd edition. Edited by: Klute A. American Society of Agronomy—Soil Science Society of America, Madison, Wis, USA; 1986.
Decagon devices. EC-5 sensor http://www.decagon.com/ag_research/soil/ec5.php
Ritsema C, Kuipers H, Kleiboer L, et al.: A new wireless underground network system for continuous monitoring of soil water contents. Water Resources Research Journal 2009, 45: 1-9.
Bogena HR, Huisman JA, Oberdorster C, Vereecken H: Evaluation of a low-cost soil water content sensor for wireless network applications. Journal of Hydrology 2007, 344(1-2):32-42. 10.1016/j.jhydrol.2007.06.032
Zuniga M, Krishnamachari B: Analyzing the transitional region in low power wireless links. Proceedings of the 1st Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (SECON '04), October 2004, Santa Clara, Calif, USA 517-526.
Rappaport TS: Wireless Communications—Principles and Practice. 1st edition. Prentice Hall, Englewood Cliffs, NJ, USA; 1996.
Acknowledgments
The authors would like to thank Dr. Suat Irmak for his valuable comments throughout the development of the WUSN testbed at Clay Center, NE and Emily Casper and the UNL Landscaping Services staff for their valuable help during the experiments at City Campus.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Silva, A.R., Vuran, M.C. Development of a Testbed for Wireless Underground Sensor Networks. J Wireless Com Network 2010, 620307 (2010). https://doi.org/10.1155/2010/620307
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1155/2010/620307